

効果と使い方

作成するプログラムの価値を飛躍的にUP!!
現場に行かずに検討開始できるので、作業効率は格段に向上します。
ロボットプログラミングには各ロボット純正のツールを使うため、実機と同じ動きを作ることができ、 高度なサイクルタイム検証と特異姿勢チェック、干渉チェックができます。

"伝わらない" そのモヤモヤを解消!
周辺機器やロボットをマウス1つで移動でき、簡単に現場のレイアウトやロボットの設置イメージを作成できます。
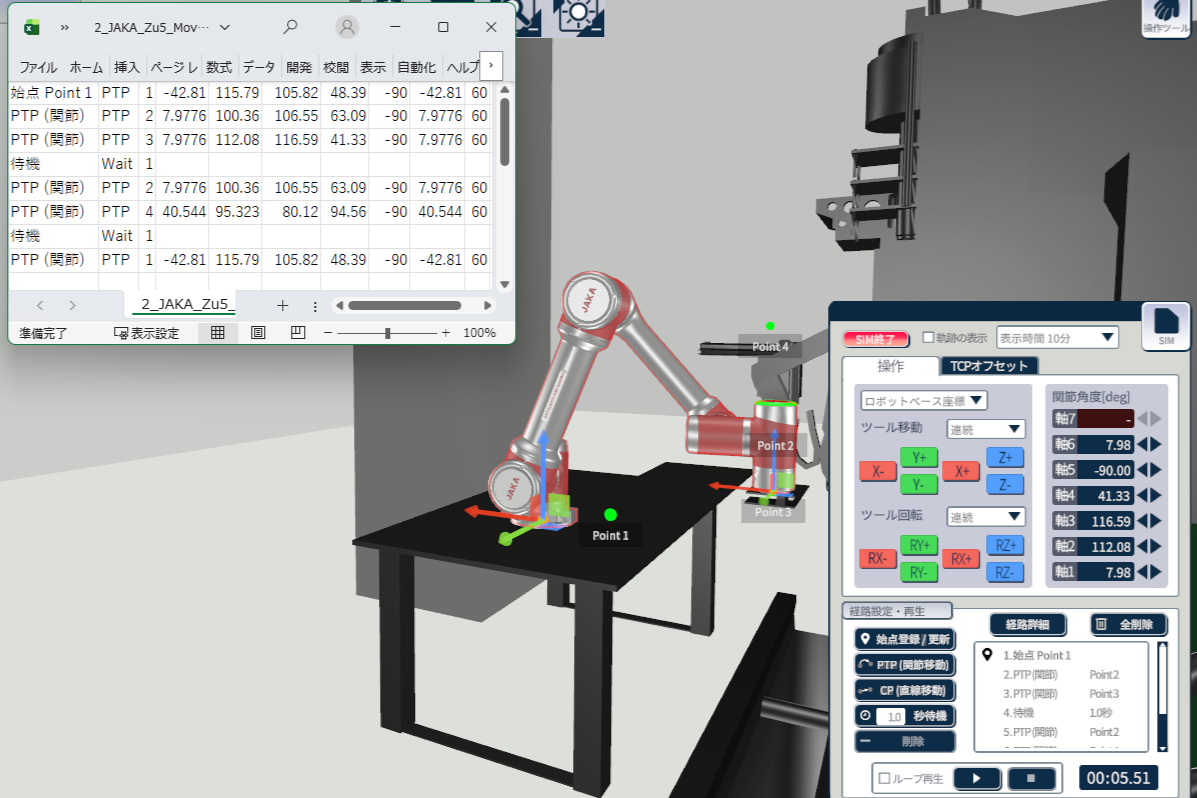
実機と同じプログラムを仮想のロボットで!
PC上で各社のティーチングツールとSF Twin™ Cobot 2.0を両方立ち上げ、通信させて利用します。
使い慣れたティーチングツールで同じようにティーチングするだけ。
実機と同じ方法でティーチングするので、実機移行時のトラブルはありません。
作成したプログラムを再生すると、SF Twin™ Cobot 2.0内のロボットが連動し、動作の確認ができます。
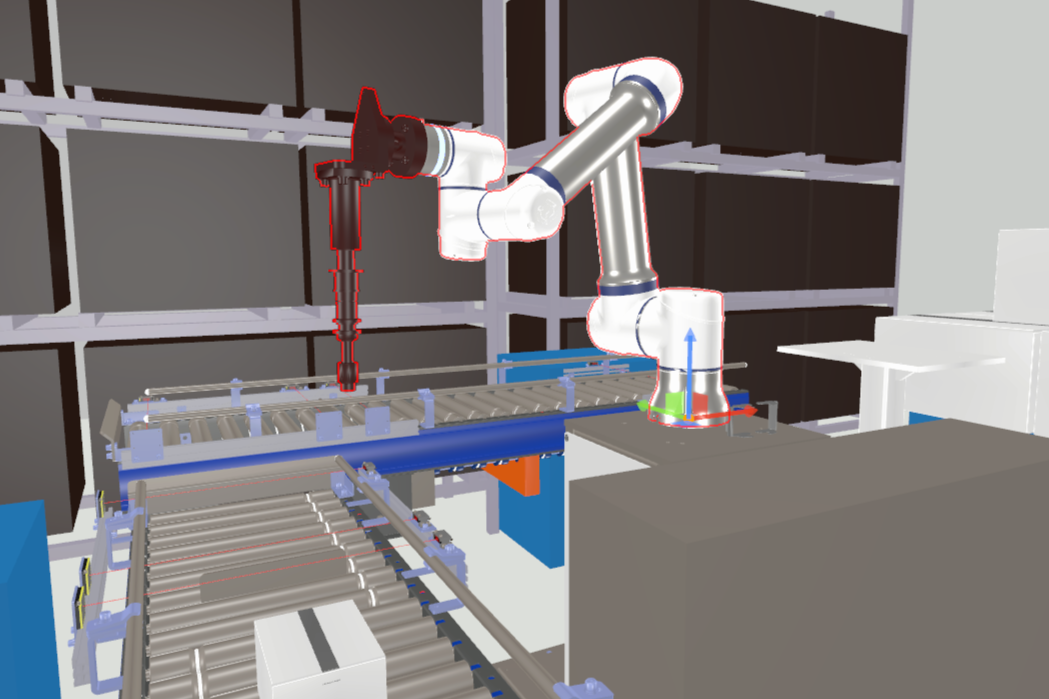
実機と全く同じ動きで干渉チェックが可能
そのため、忠実な干渉チェックが可能です。
周辺の機器やレイアウトアイテムとロボットや先端ツールが干渉した場合には、「干渉アラート」が表示され、一目瞭然です。
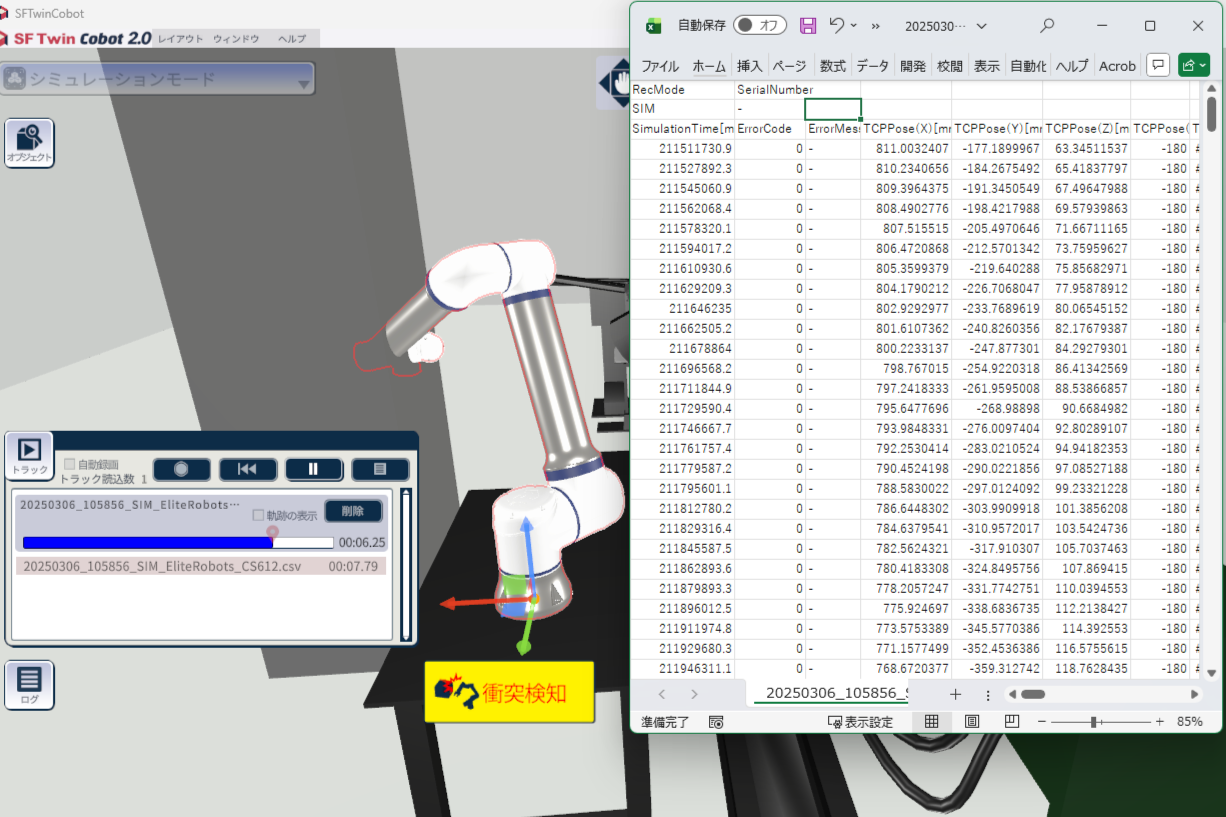
実機と全く同じ動きなので、正確なサイクルタイム検証が可能
簡単な動きの確認は、1分で!!
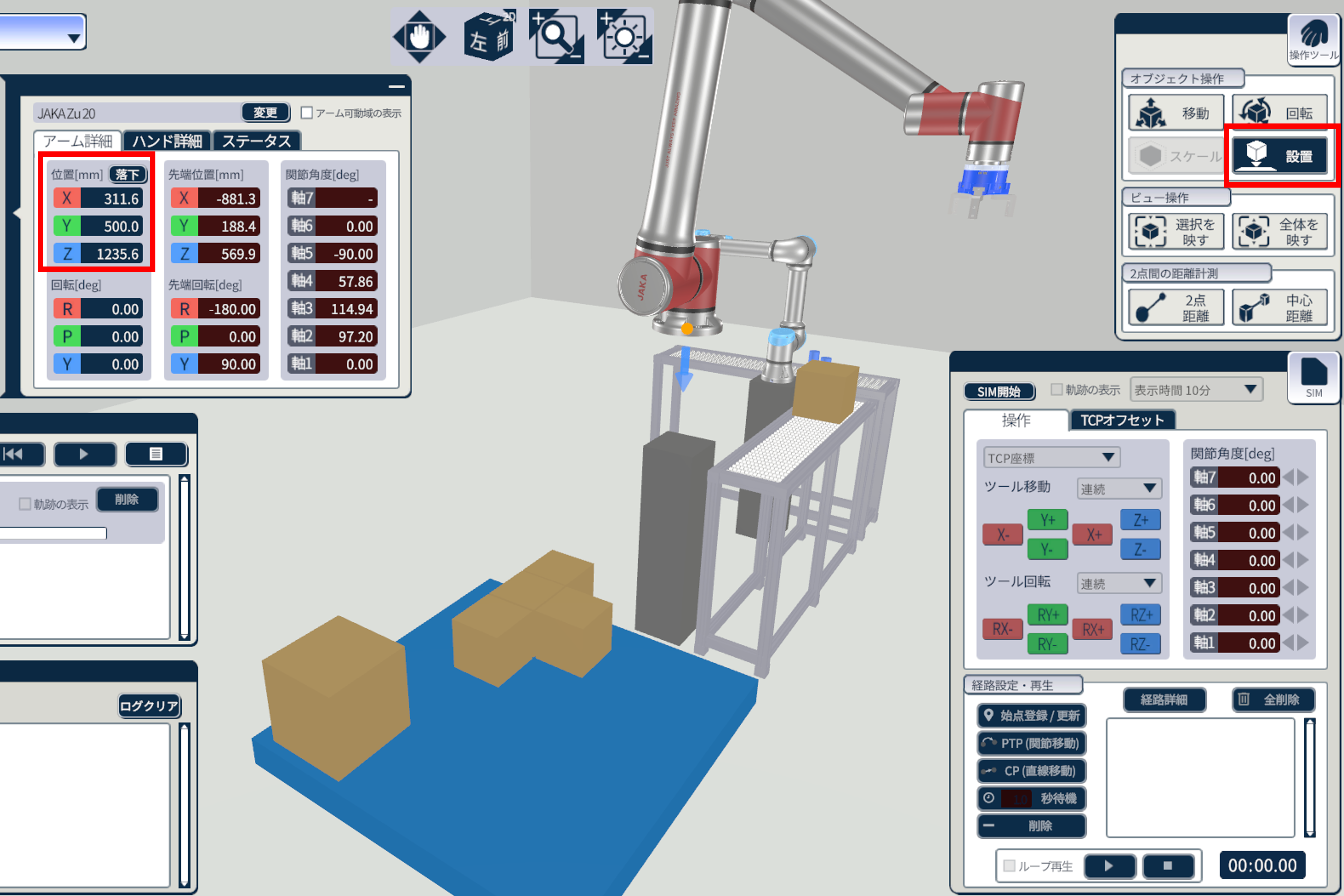
マウスでロボットの先端を動かしてポイント設定をすることできます。簡単な動きであれば、わずか1分でロボットを動かせます!
プログラミング言語も不要で営業マンでも簡単に触れるシンプル設計です。
ロボットの選定・可動範囲チェックはシミュレーション機能でも充分
ロボットは各社の軸パラメータを反映しているため、可動範囲や取れる姿勢は、シミュレーション機能だけでも充分確認できます。
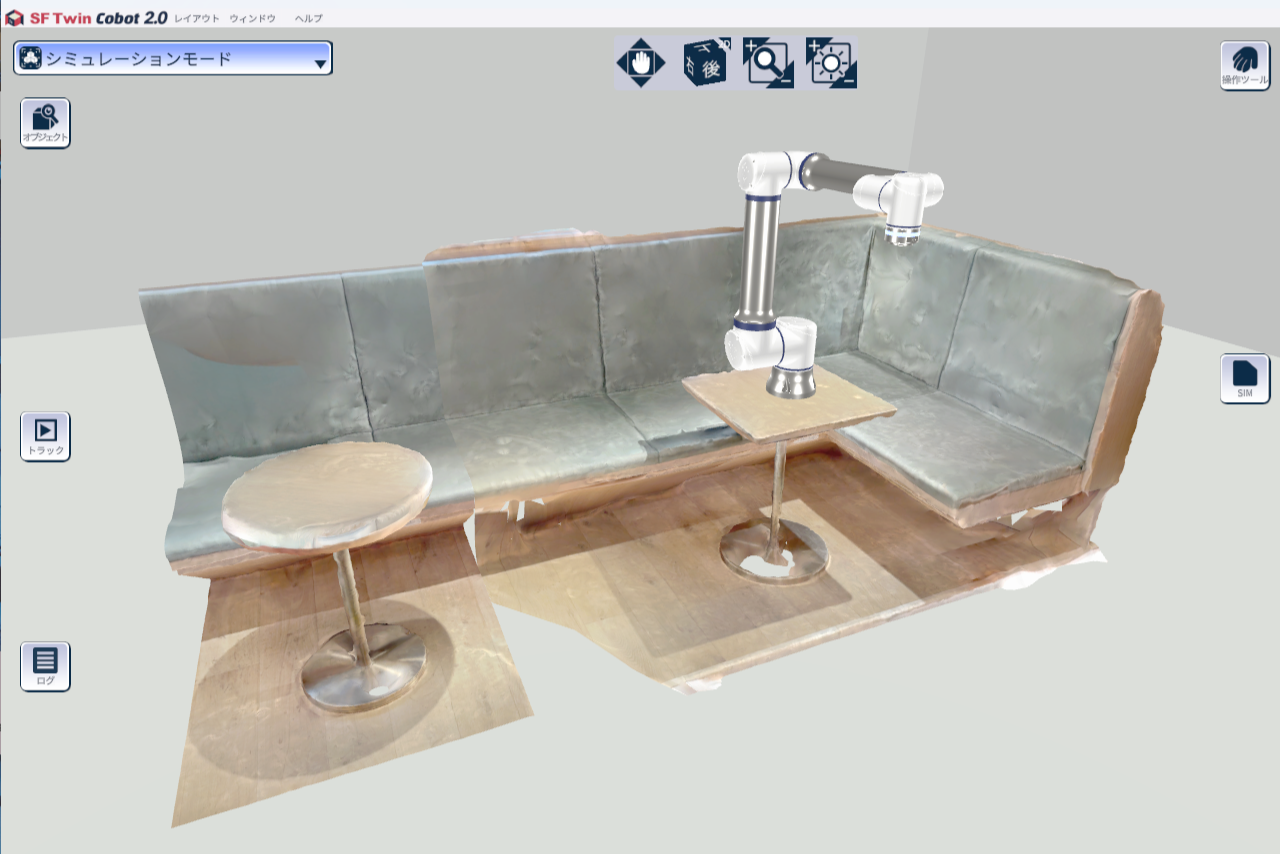
オフラインティーチング時に最初のハードルになる"仮想工場の再現"
SF Twin™ Cobot 2.0では、できる限り簡単に向上再現を実現します。
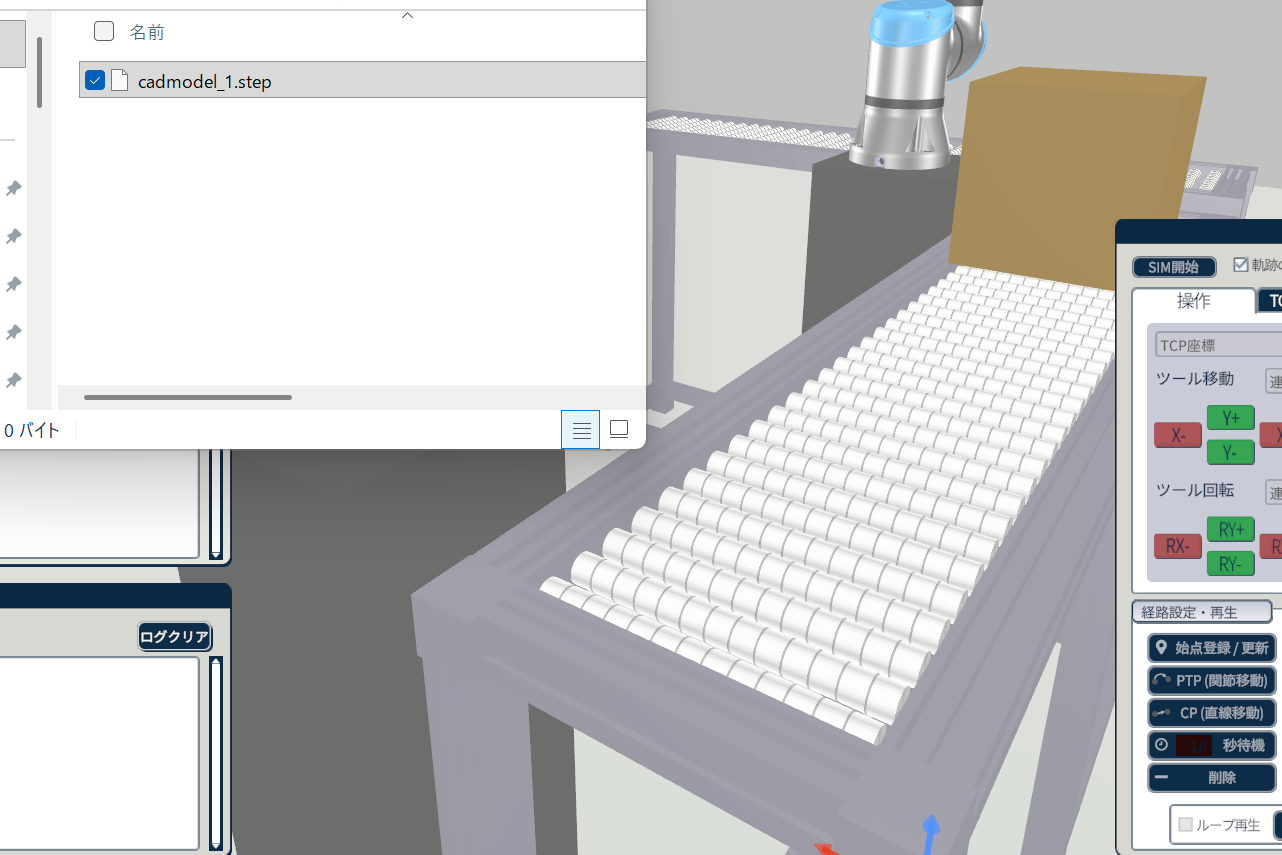
CAD図インポート
STEP, STL, FBXに対応しています。
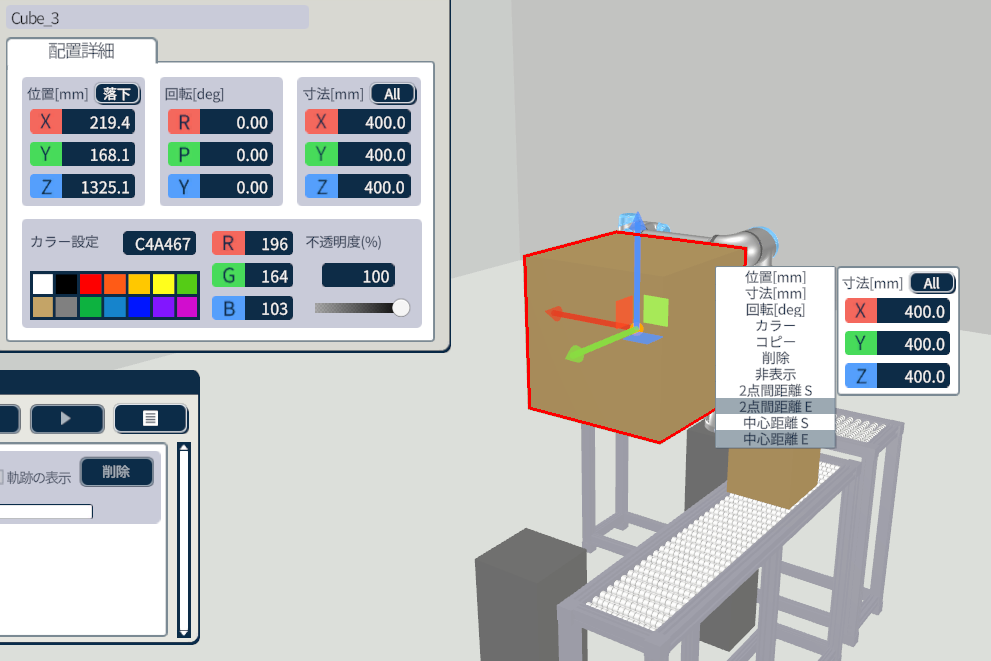
オブジェクト生成
大きさも簡単に変更できるので、まだ未確定な架台の高さ検討にも使えます。
スマホのスキャンデータも取り込み可能
簡単設置
「落下」ボタンで密着させることも。
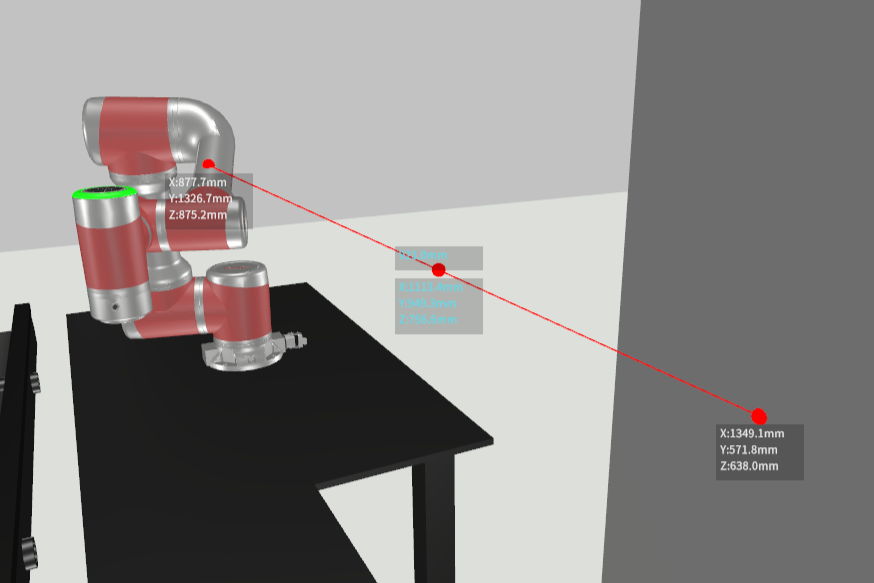
メジャー機能
ハンドインポート
先端ツールを含めて干渉チェック可能です。(※開閉は不可)
ログ保存
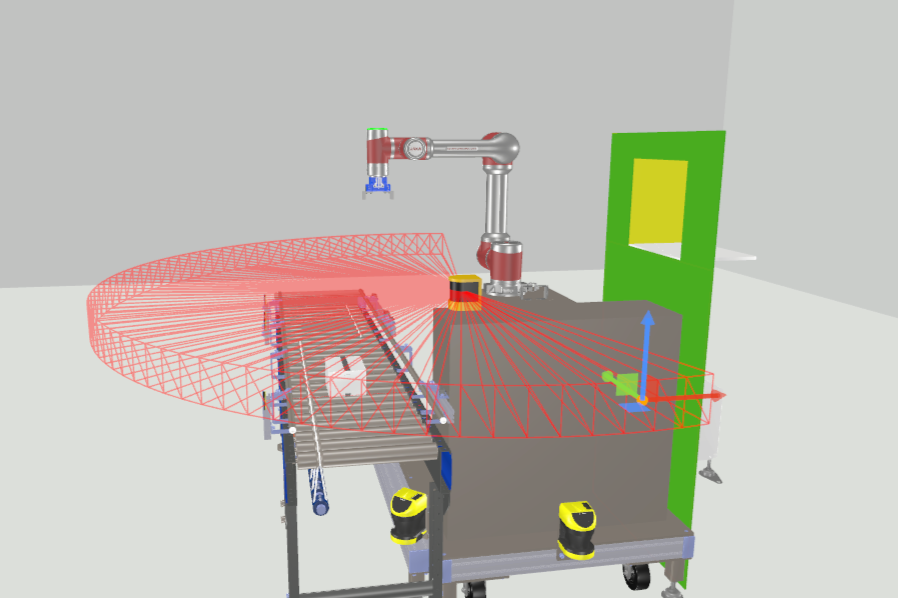
安全エリア確認
ポイント保存
対応ロボット一覧
現在対応しているロボットは以下です。(対応ロボットは、随時追加を予定しております。)
| ロボットメーカー | ロボット名 | シミュレーション | ティーチング | モニタリング |
|---|---|---|---|---|
| Elite Robots |
CS63, CS66, CS612, CS620, CS625※1 |
◎ | 〇※1 | 〇 |
| FAIR Innovation (Suzhou) Robot Systems Co., Ltd. |
FAIRINO FR3, FAIRINO FR5, FAIRINO FR10, FAIRINO FR16, FAIRINO FR20, FAIRINO FR30 |
◎ | × | × |
| JAKA Robotics |
JAKA Zu 3, JAKA Zu 5, JAKA Zu 7, JAKA Zu 12, JAKA Zu 18, JAKA Zu 20, JAKA Pro 16, JAKA MiniCobo※2 |
◎ | 〇※2 | 〇※2 |
| Techman Robot |
TM12, TM5S, TM7S, TM12S, TM14S, TM25S, TM30S |
◎ | 〇 | 〇 |
| Universal Robots |
UR3e, UR5e, UR10e, UR16e, UR20, UR30 |
◎ | 〇 | 〇 |
| 株式会社 デンソー ウェーブ |
COBOTTA, COBOTTA PRO 900※3, COBOTTA PRO 1300※3 |
◎ | 〇※3 | 〇※3 |
◎:標準機能で対応可能
〇:オプション機能として対応可能 ×:現時点で非対応
※1 Elite Robots製CS625はシミュレーションとリアルタイムモニタリングのみ対応可能、オフラインティーチングは非対応です。
※2 JAKA Robotics製JAKA MiniCoboのオフラインティーチング、リアルタイムモニタリングはご相談ください。
※3 デンソーウェーブ製COBOTTA PRO 900、COBOTTA PRO 1300はオフラインティーチング、リアルタイムモニタリング非対応です。
ご提供価格
| 基本 ライセンス |
シミュレーション機能 ※対応済みロボットは全てご利用いただけます |
50万円(税別)/1ライセンス |
|---|---|---|
| オプション ライセンス |
ティーチング機能 ※ロボットメーカーごとの機能開放となります |
7万5千円(税別)/1ライセンス/1ロボットメーカー |
|
モニタリング機能 ※ロボットメーカーごとの機能開放となります |
7万5千円(税別)/1ライセンス/1ロボットメーカー |
本製品は買い切りライセンスとなります。
一度のご購入で、常に最新版をご利用いただけます。(アップデート無償)
【購入方法】
以下のボタンより購入申込書をダウンロードし、必要事項をご記入の上お申込み下さい。

ユーザーの方はこちら
SF Twin™ Cobot 2.0の使い方を動画で解説します。

チュートリアル 「初回起動」
SF Twin™ Cobot 2.0購入後の初回起動方法を解説します。

チュートリアル 「工場の再現」
SF Twin™ Cobot 2.0を利用した、レイアウトの再現方法や画面の操作方法を解説します。

チュートリアル 「ソフトウェアのアップデート」
SF Twin™ Cobot 2.0の最新バージョンへのアップデート方法を解説します。
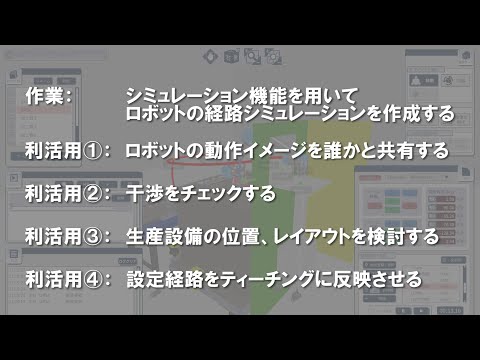
チュートリアル 「経路シミュレーション方法と利活用」
シミュレーション機能を使用した経路シミュレーションの方法と、作成経路の利活用について解説します。
#動作イメージ共有 #干渉チェック #レイアウト検討
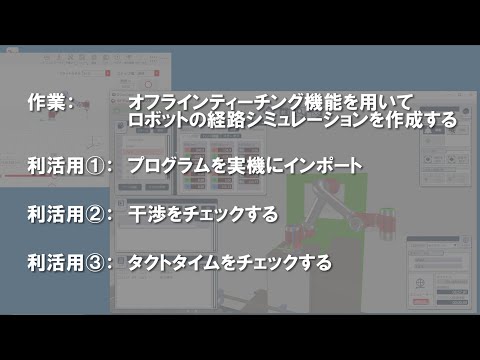
チュートリアル 「ティーチング方法と利活用①」
ティーチング機能を使用してロボットの経路(プログラム)を作成する方法と、作成経路の利活用について解説します。
#プログラムエクスポート #干渉チェック #ハンド #TCP
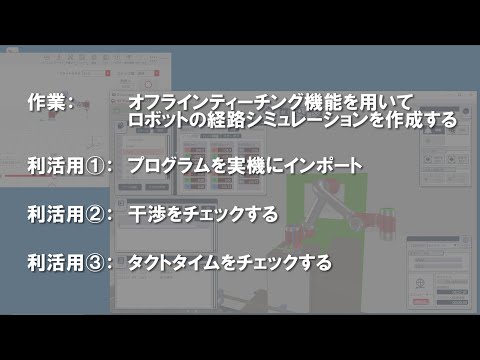
チュートリアル 「ティーチング方法と利活用②」
ティーチング機能を使用して作成した経路の利活用について解説します。
#ロボット挙動録画 #タクトタイム

チュートリアル 「VirtualBoxインストール」
Oracle社VirtualBoxのダウンロード・インストール手順を解説します。
各メーカーのティーチング機能の使い方
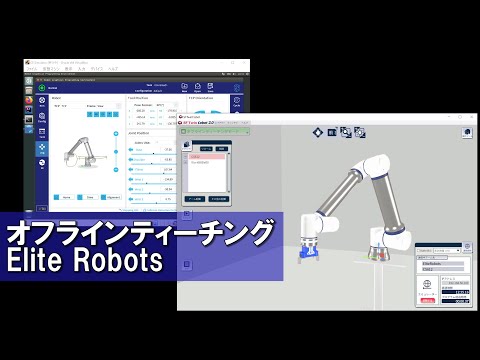
Elite Robots
ティーチング機能の使い方
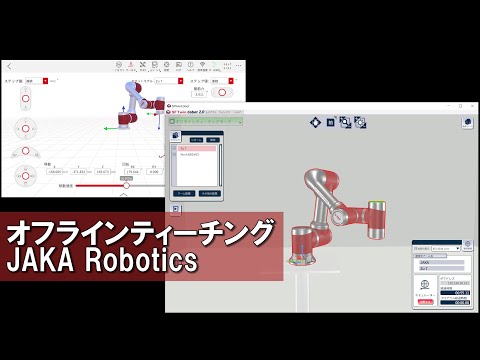
JAKA Robotics
ティーチング機能の使い方

Techman Robot
ティーチング機能の使い方
※ チュートリアル動画内のSF Twin™ Cobot 2.0画面は、ソフトウェアバージョンによって一部見た目が異なる場合がございます。
| ユーザーマニュアル | ユーザーマニュアルはこちらをご覧ください。 |
|---|---|
| ソフトウェア |
最新版のソフトウェアはここからダウンロードをお願い致します。 ダウンロード後の インストール方法 については、こちらをご覧ください。 |
| リリースノート | アップデート情報はこちらをご覧ください。 |
動作確認を実施した環境は以下になります。
| OS | Windows11 | |
|---|---|---|
| CPU | 13th Gen Intel® Core™ i5-1335U 1.30GHz | |
| メモリ | 16.0GB | |
| GPU | NVIDIA GeForce MX550 | |
| アプリケーション | JAKA Robotics | JAKA APP:JAKA Zu v1.7.1.16 x64 |
| JAKA コントローラ:Version 1.7.1_18_X86_cab2_1 | ||
| VirtualBox 7.0.14 | ||
| Elite Robots | ELITE CS Simulator V.2.6.0-001 | |
| VMware | ||
| Universal Robots | URCAPS STARTER PACKAGE Ver1.14.0 (必要なアプリケーションが含まれたパッケージ) |
|
| VirtualBox 7.0.14 | ||
| Techman Robot | TMflow Ver.2.18.3300 | |
| 株式会社デンソーウェーブ | WINCAPSⅢ Ver3.65.6 | |